
Preventing Back Pain with Robots

Credits: EU project SPEXOR - www.spexor.eu
Using robotic assistance to prevent or mitigate back pain – that is the goal of a new European research project whose members include researchers from the Interdisciplinary Center for Scientific Computing (IWR) of Heidelberg University. Project scientists plan to develop an exoskeleton for the human spine that provides support during heavy physical work. The European Union is funding the project with nearly four million euros. A robotic suit of this type can also be used for rehabilitation. The research team in Heidelberg led by Prof. Dr. Katja Mombaur will develop a computerised human model depicting all the muscles in order to simulate the lower spine. Their work is being funded in the amount of 680,000 euros. The four-year SPEXOR project started in January 2016.
Credits: EU project SPEXOR - www.spexor.eu
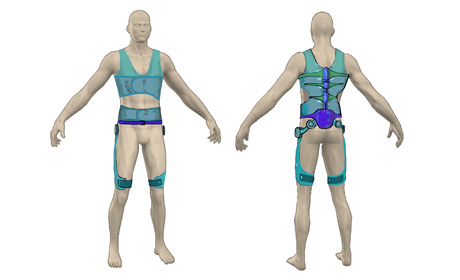
“Exoskeleton robots are like shells, worn over parts of the body or the entire body, much like clothing. They can compensate for individual physical limitations by improving the mobility of the arms and legs, for example”, explains Katja Mombaur, head of the “Optimization in Robotics and Biomechanics” research group. The researchers from various disciplines working on the SPEXOR project now intend to develop an exoskeleton for the spine to prevent lower back pain and to help treat complaints. Mombaur, a mathematician and computer scientist, is researching movement processes in the human body. She is modelling and simulating the processes on the computer in order to transfer them to robots.
In the SPEXOR project, the researchers from Heidelberg will model and optimise human-exoskeleton interaction. They are developing a human model with muscles that simulate the lower spine, and intend to design both passive and active exoskeletons. They will also analyse the behaviour of people suffering from lower back pain and appropriate relief mechanisms in order to subsequently optimise the exoskeleton design for prevention and rehabilitation. The researchers will also design control strategies for exoskeletons.
The Jozef Stefan Institute in Ljubljana, Slovenia, is coordinating the “Spinal Exoskeletal Robot for Low Back Pain Prevention and Vocational Reintegration (SPEXOR)” project. Other partners include the Free University of Brussels in Belgium, the Amsterdam University Medical Center in the Netherlands, and a number of medical technology and rehabilitation companies.